几篇论文主要是改网络,这里附上图,用到的时候再细看吧,未标明会议的都是cvpr 2020。。
Structure-Preserving Super Resolution with Gradient Guidance
基本思路是增强edge,和之前几篇low level基于edge增强的论文思路一致,并不是新东西,主要结构如下所示:

补充一下,这篇文章还是有点意义的,至少论证了edge在使用GAN的情况下可以显著提高perceptual质量(不使用GAN是达不到的),比后面那篇cvpr的sr改网络的论文还是强不少的,这样看至少还是有点impressive的。
Spatially-Attentive Patch-Hierarchical Network for Adaptive Motion Deblurring
结构花里胡哨的,将之前DHMN,SRN,各种attention组合在一起,结构如下(下面是CA模块):



几个模块分别如下所示:


Multi-Scale Boosted Dehazing Network with Dense Feature Fusion
在U-Net里融入多尺度boosting做去雾,结构如下所示:

不同boosting的结构对比和DFF结构如下所示:


plus,下面这篇不是cvpr2020论文,结构可能以后用上,先放在这里:

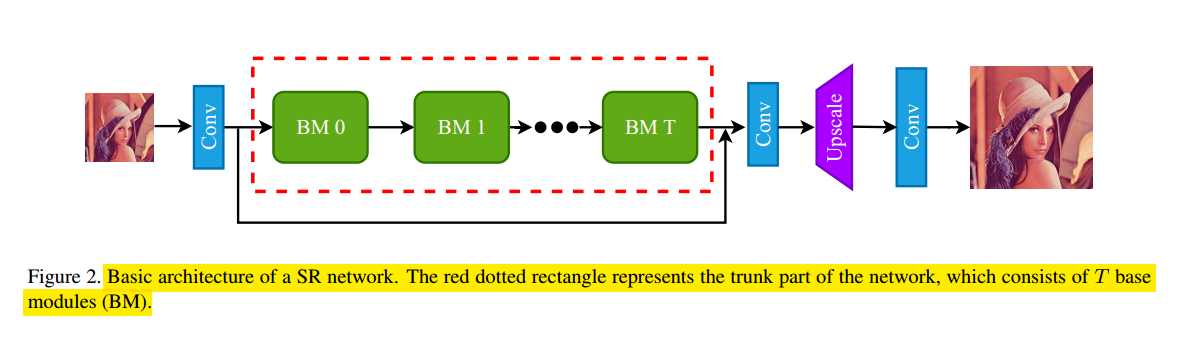
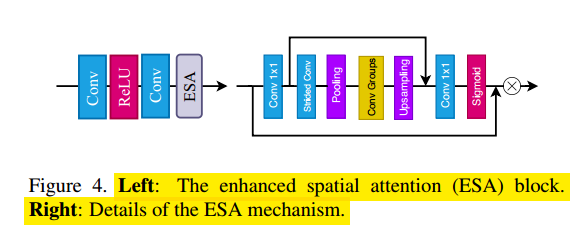
Residual Feature Aggregation Network for Image Super-Resolution
网络图直接放在下面,就是多级residual网络连在一起,ESA是对spatial attention中间的特征进行downsample,不知道为啥能中…

Gated Context Aggregation Network for Image Dehazing and Deraining(WACV 2019)
主要结构如下所示:
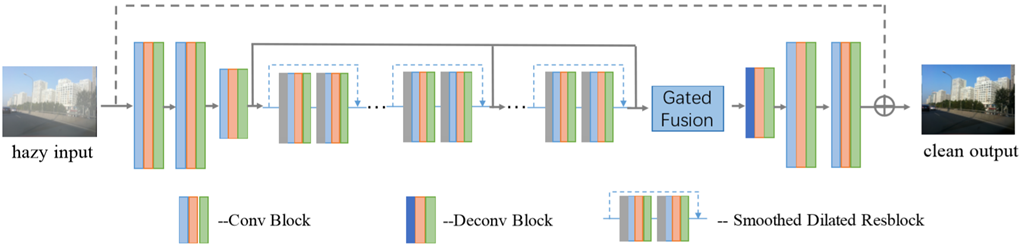
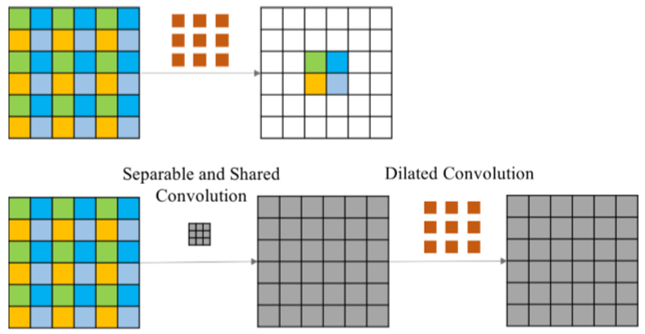
针对空洞卷积产生伪影的原因,论文认为是空洞卷积采样的点之间没有依赖关系导致的,所以在空洞卷积之前加一个depthwise conv去解决这个问题,从而添加上一点依赖关系(对于dialated较大的空洞,似乎需要很多层?有没有更好的方式?)
然后是多级融合部分,这个没啥好说的了。。。
Non-locally Enhanced Encoder-Decoder Network for Single Image De-raining(ACMMM 2019)
主要结构如下,使用unpool可以更好恢复细节(这个作用非常大,本人对比过!):

使用nonlocal模块,可以在不同尺度上捕捉雨线,从而进行消除,特别的,对于浅层较大的feature map,这里将fearure划分成多个patch进行nonlocal,从而减少计算量:

FFA-Net:Feature Fusion Attention Network for Single Image Dehazing(AAAI 2020)
主要结构如下,
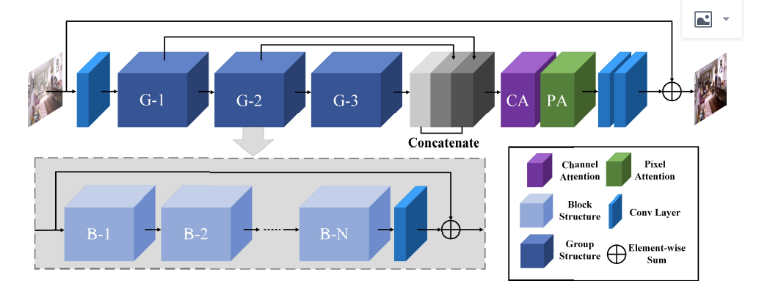
使用feature fusion加上channel和spatial attention去提升性能,如下所示:

