这是2018 ECCV的一篇论文,感觉做的很简单。就随便说说吧。
论文要解决的问题是,多曝光图像融合,去解决有较大前景移动的问题。前面的方法是估计出光流然后去得到最终结果图。这里,提出的方法目的是不使用光流,且可以产生在所有曝光情况下都损失的细节。结构图如下:
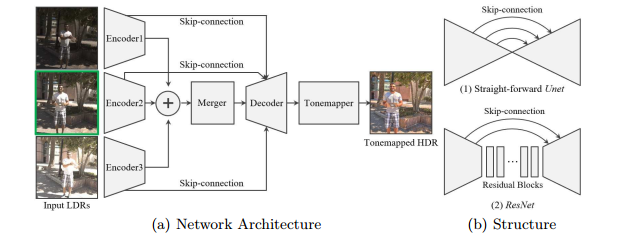
看了结构图就知道在干啥了,编解码网络是使用的是Unet,合并网络使用的是resnet。输入图像是原始LDR图像和Gamma图像校正后concat在一起的结果,是一个六通道的图。LDR是用来确定没有对齐和饱和度区域的检测,校正图像是为了增强网络在各种曝光情况下的鲁棒性。产生的图像使用tone mapping校正,再计算Loss,因为最后展示结果都是tone mapping过后的结果。其他见论文。